+86-13073105066
admin@longshubearing.com







製品































ロボット、マニピュレーター用ベアリング
ロボットのベアリングは産業用ロボットの重要なコンポーネントです。主にマニピュレータージョイント、回転ユニット、精密回転テーブルなどに使用されます。それらの特性は、ロボットのスムーズな動作、再現可能な位置決め、および動作の信頼性に直接影響します。
説明
マーカー
製品説明
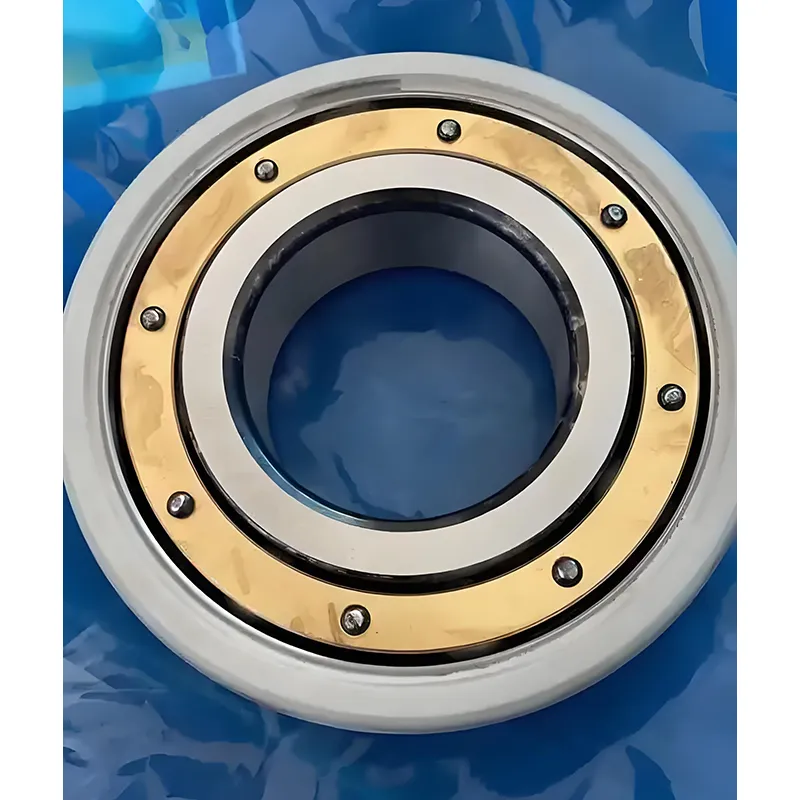
ロボットのベアリングは産業用ロボットの重要なコンポーネントです。主にマニピュレータージョイント、回転ユニット、精密回転テーブルなどに使用されます。それらの特性は、ロボットのスムーズな動作、再現可能な位置決め、および動作の信頼性に直接影響します。主な種類には、クロスローラーベアリング、薄肉ベアリング、波動歯車ベアリング、滑りベアリングなどがあります。中でもクロスローラーベアリングは、ラジアル荷重とアキシアル荷重と転倒モーメントを同時に吸収できることから、有力な地位を占めています。一部の製品には、性能を向上させるために窒化ケイ素セラミックビーズや超仕上げ表面処理などの技術が使用されています。
産業用ロボットのベアリングは、主に薄肉イコールベアリング、クロスローラーベアリング、波動歯車ベアリング、プレーンベアリング、RVギアベアリング、電動モーターベアリング、リードスクリューベアリングに分けられます。
設計技術
産業用ロボットのコンポーネントであるベアリングの設計原則は、公称動的負荷容量、剛性、摩擦モーメントの 3 つの指標を目的関数とする多基準の最適化を規定する必要があります。主要なテクノロジーには、転がり接触理論、動的荷重解析、熱解析、信頼性評価が含まれます。転がり接触理論は、転動面の接触応力と変形挙動を記述し、軸受の疲労寿命と耐荷重能力を予測できるようにします。動的荷重解析は、動的荷重条件下でのベアリングの性能をモデル化します。熱解析により、ベアリング内の温度分布と熱応力を予測し、高温での安定性と信頼性を確保できます。確率モデルと統計分析に基づいた信頼性評価により、潜在的な障害を予測して防止できます。
製造技術と精密加工
ロボットベアリングの製造における主要な技術には、次のものが含まれます。 薄肉ベアリングのネガティブすきまを正確に制御する技術。薄肉アンギュラ玉軸受の取り付け高さの制御。薄肉ベアリングを組み立てる技術。薄肉軌道輪の内外径を非接触で測定する技術。具体的なプロセスには、研削加工硬化層の制御に基づいた軌道輪の精密研削技術も含まれます。熱間静水圧プレスにより、ベアリングの残留応力が 60% 削減されます。制御された雰囲気中で硬化し、変形を 0.02 mm 以内に確実に制御します。
")
")
")
")
お問い合わせください
関連人気商品

SKFブランドベアリング
輸入ベアリングは中国製ベアリングと対比される概念です。輸入ベアリングは、強力なブランドサポート、高度な科学的概念と革新性を提供するだけでなく、完璧なアフターサービスと製品範囲の強力な拡大も提供します。

自動車用ベアリング-ギアボックスベアリング
トランスミッション ベアリングは、自動車トランスミッションの重要な機械部品であり、回転シャフトをサポートし、摩擦を軽減するように設計されています。損傷すると異音、温度上昇、ニュートラルギアでの異音などの症状が現れるため、適時の修理・交換が必要となります。

自動車用ベアリング - ステアリングギアベアリングの修理
ステアリングギアベアリングは、自動車のステアリングシステムの重要な部品であり、ステアリングシステムベアリングのカテゴリに属し、主に自動車のステアリングホイールの内部構造に使用され、ステアリングギアを支持する主な機能を持っています。
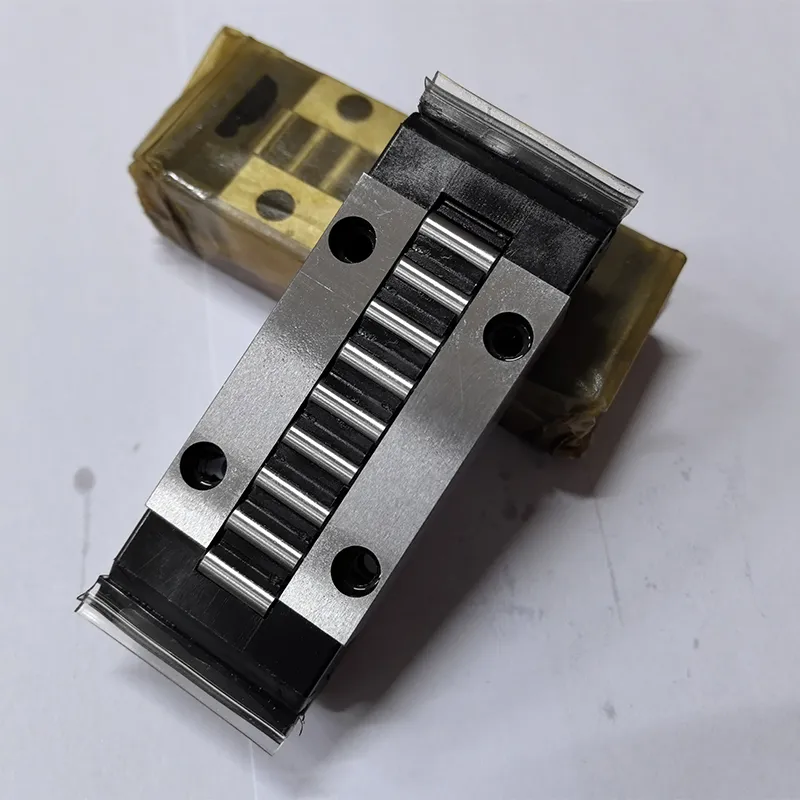
リニアガイド用ベアリング
リニアガイドは、リニアレール、滑りガイド、リニアガイドレールとも呼ばれ、機械部品を所定の方向に案内して高精度、低摩擦の直線運動を実現するために使用される装置です。

NSKブランドベアリング
輸入ベアリングは中国製ベアリングと対比される概念です。輸入ベアリングは、強力なブランドサポート、高度な科学的概念と革新性を提供するだけでなく、完璧なアフターサービスと製品範囲の強力な拡大も提供します。

窒化ケイ素ボールを使用したセラミックベアリング
セラミックボールベアリングは、転動体にセラミック材料を使用した工業用ベアリングです。通常、セラミックボール (ホットプレスされた窒化ケイ素 Si3N4 または二酸化ジルコニウム) と金属リングを組み合わせた設計が使用されます。

FAGブランドのベアリング
輸入ベアリングは中国製ベアリングと対比される概念です。輸入ベアリングは、強力なブランドサポート、高度な科学的概念と革新性を提供するだけでなく、完璧なアフターサービスと製品範囲の強力な拡大も提供します。

農業機械用ベアリング
農業機械用ベアリングは農業機械の最も重要な基本部品であり、トラクター、ベーラー、コンバインなどの農業機械に広く使用されています。農業用ベアリングの精度、性能、耐用年数、信頼性は、農業機械において重要な役割を果たします。

マウンテンバイクのベアリング
マウンテンバイクのベアリングは乗り心地を左右する重要なコンポーネントの1つです。これらは通常、ブッシュ、キャリッジ、ステアリングコラムなどのコンポーネントに隠されており、目立たないものの、摩擦を軽減し、部品のスムーズな回転を確保するという重要な機能を果たしています。ベアリングの種類とそのメンテナンスや交換について知ることは、バイクを良好な状態に保ち、寿命を延ばすのに役立ちます。



自動車用ベアリング-ホイールベアリング
ホイールベアリングは車の重要な部品の一つです。その主な機能は重量を支え、ハブの正確な回転方向を提供することであり、そのためにはアキシアル荷重とラジアル荷重の両方に耐えられる必要があります。